第6回「足回りについて」
ホイールの種類
足回りはどの種類のホイールを使うかよって大雑把に分類することができます。
①オムニホイール
②メカナムホイール
③普通のホイール
①オムニホイールを使った足回り
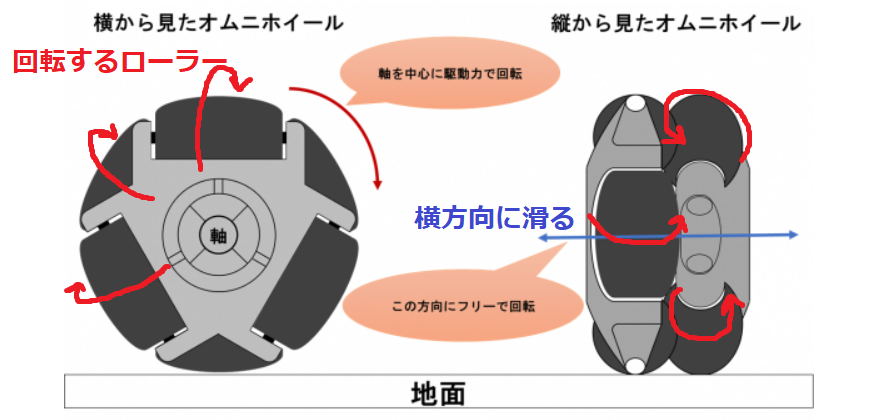
オムニホイールとは

オムニホイールとは、周りにくるくる回るローラーがついたホイールのことを言います。ローラーがついているため普通のホイールのように回転するだけでなく、横方向に滑ることもできます。
オムニホイールを使った全方向移動できる足回り
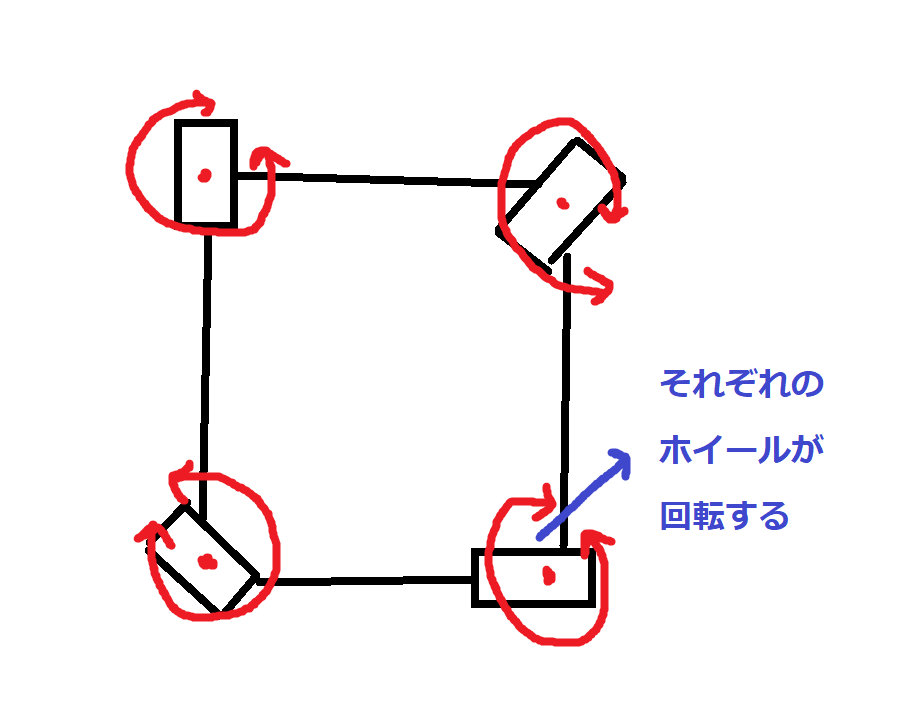
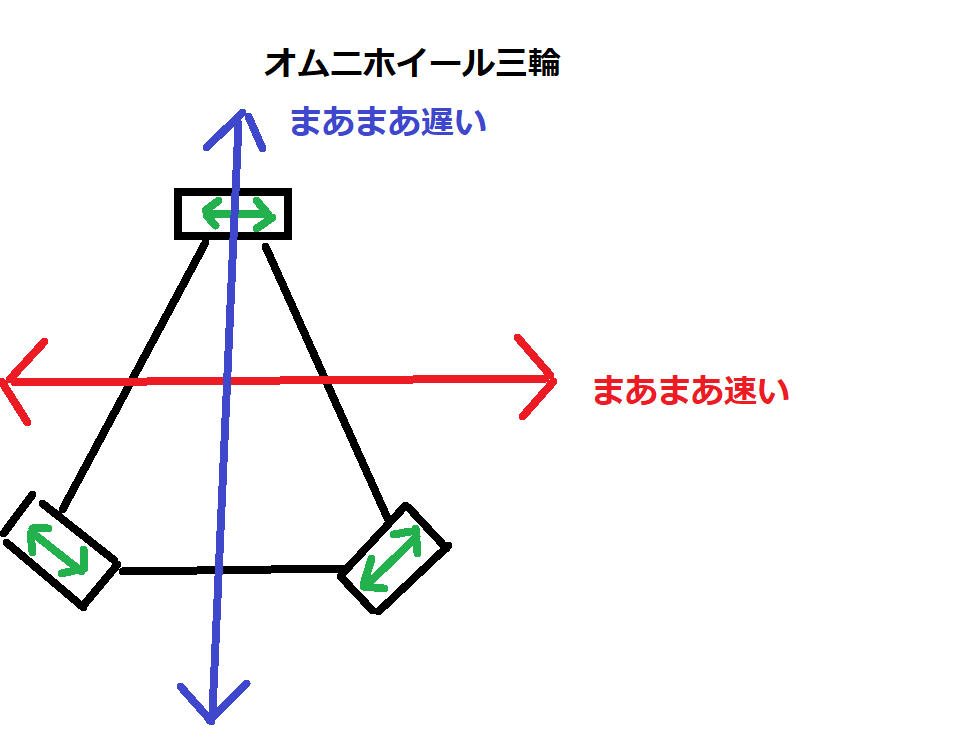
最低3個のオムニホイールがあれば、全方向移動できる足回りが作れます。 ではどのようにオムニホイールを配置すればそれが可能になるのでしょうか?下にいくつか例を挙げたいと思います。下の例は「8方向に進む」「旋回」ができます。
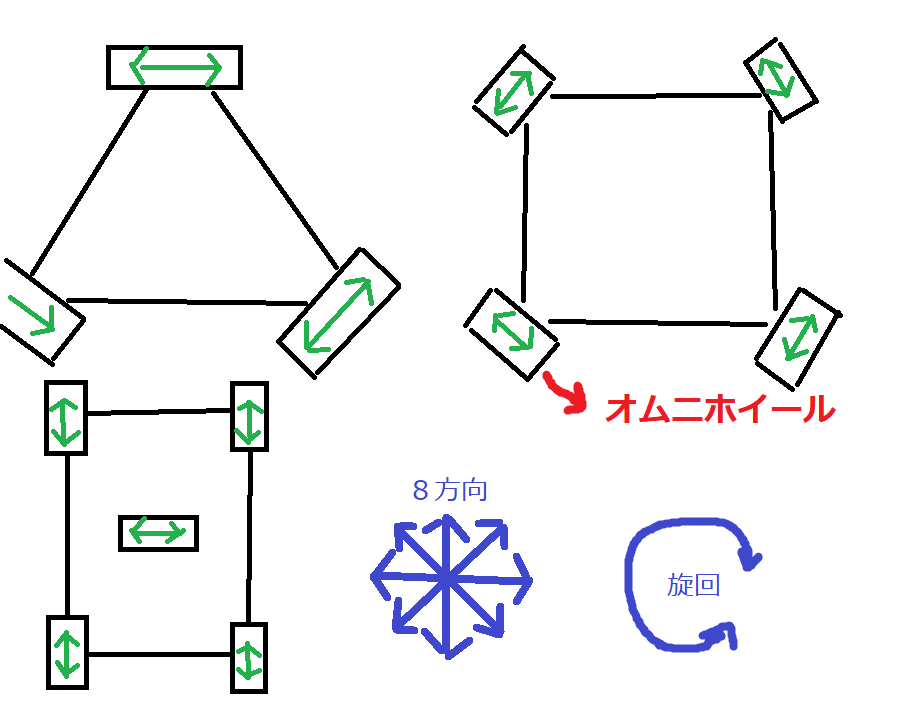
※ちなみに各ホイールにはモーターがくっついていて、それぞれ独立して回転します。
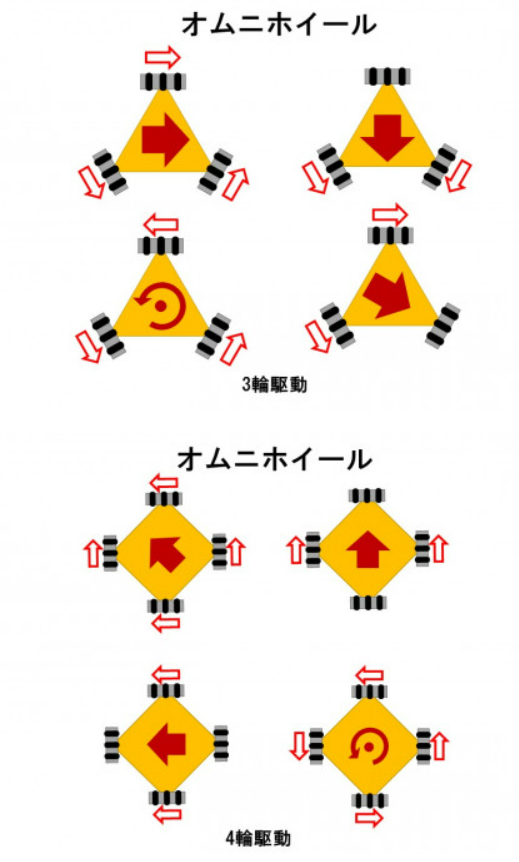
それぞれのホイールの回転方向
注意!
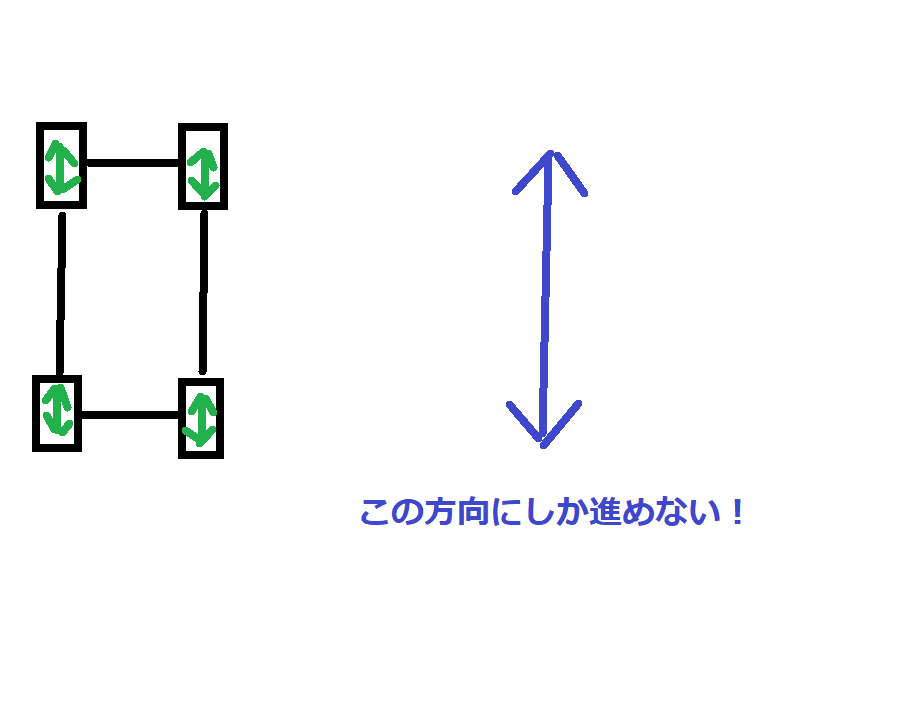
下のように配置しても全方向には進めません!(メカナムホイールだったらできる。)
②メカナムホイールを使った足回り
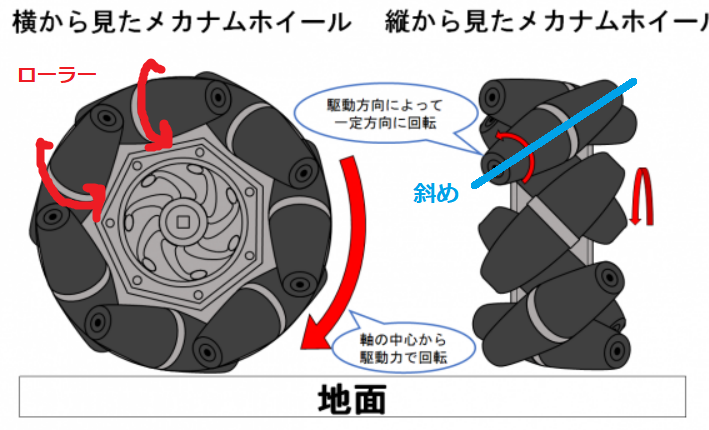
メカナムホイールとは

メカナムホイールも、ホイールの周りにローラーが付いた構造になっています。ただし、オムニホイールと違うのは、それぞれローラーが45°斜めにかたむいている点です。
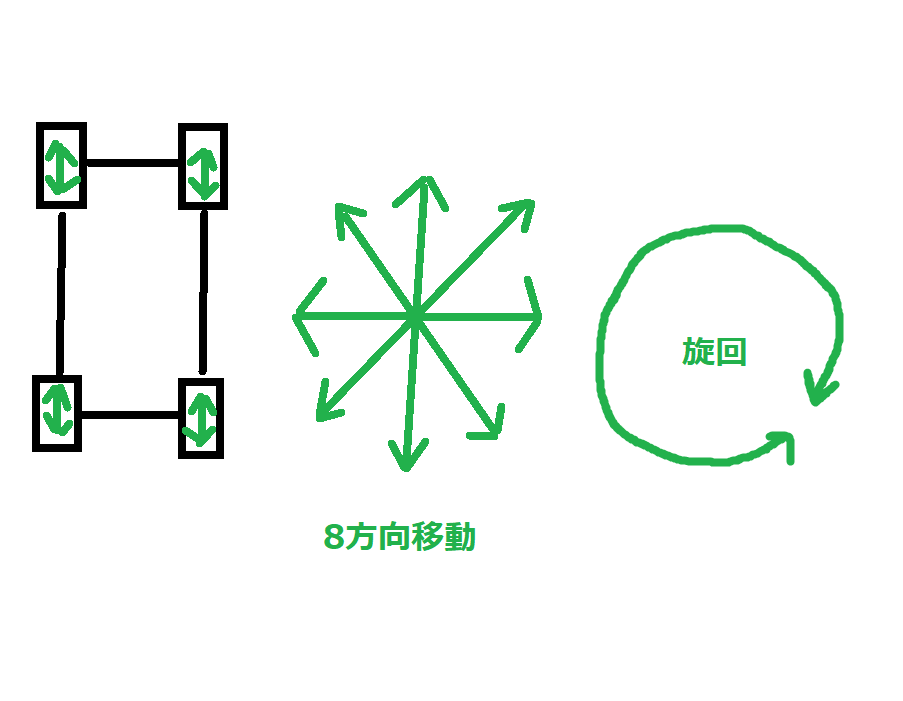
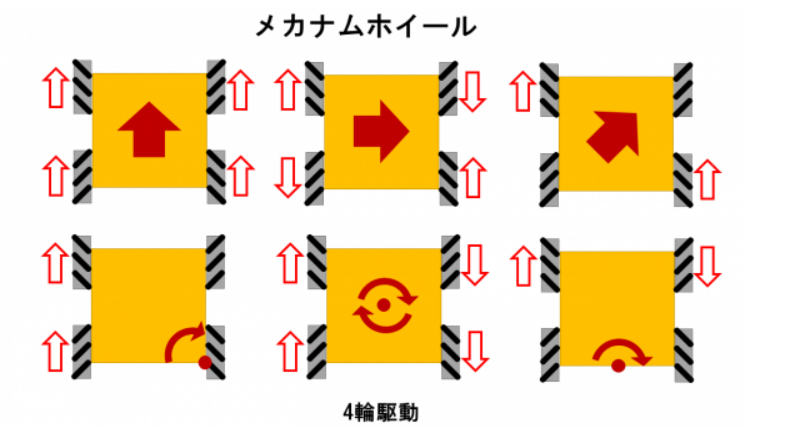
メカナムホイールを使った全方向移動できる足回り
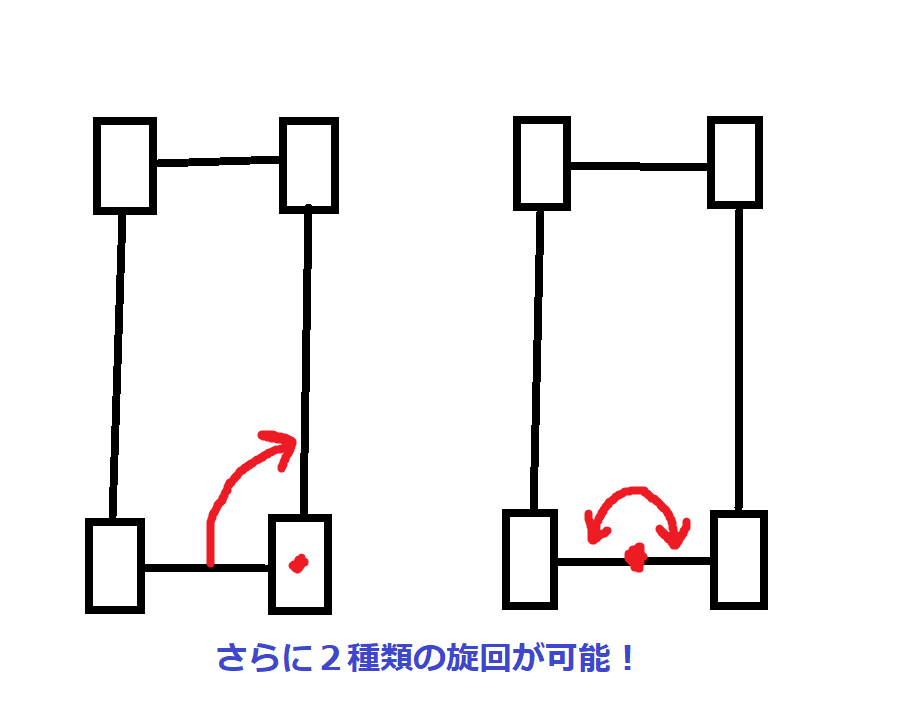
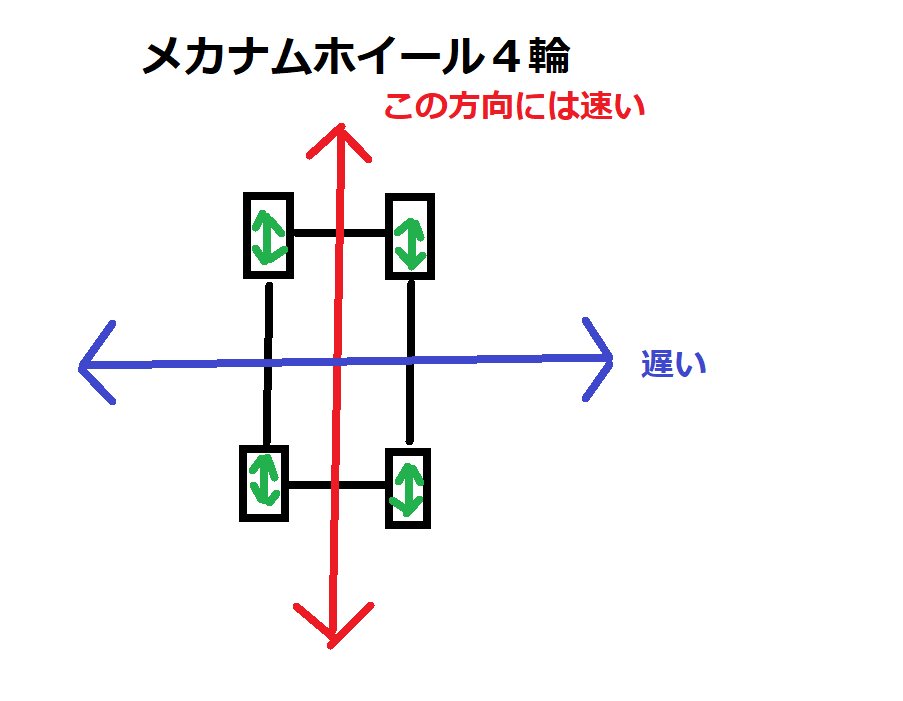
最低4個のメカナムホイールがあれば、全方向移動できる足回りが作れます。(オムニホイールは3個でしたね!) 下に一例をあげておきます。下図のようにメカナムホイールを配置すると「8方向移動」と「旋回」ができます。それだけでなく、この配置はさらに2種類の旋回をすることも可能です。
※オムニホイールだとこの配置じゃ全方向には移動できません。
それぞれのメカナムホイールの回転方向
オムニホイールとメカナムホイールの比較
ここでオムニホイールとメカナムホイールを比べてみましょう。
1,全方向移動できるために必要なホイール数
オムニホイール・・・最低3個 メカナムホイール・・・最低4個
2,段差や路面の変化
オムニホイールよりメカナムホイールの方が段差や路面の変化に強い
3,旋回軸の数
メカナムホイールの方が多い。(メカナムホイールを使った足回りの方が多くの旋回方法を持つことが多い)
4,どちらの方が速いか
それはどういう風にホイールを配置するかによる。(後で話します) ただ、一般にメカナムホイールを使った方がスピードの速いホイールの配置をしやすいことが多い。
5,滑りやすさ
ぶっちゃけどっちも滑りやすい。(この後話す足回りの種類の中には滑りにくいものもあります)
③普通のホイールを使った足回り
普通のホイールとは

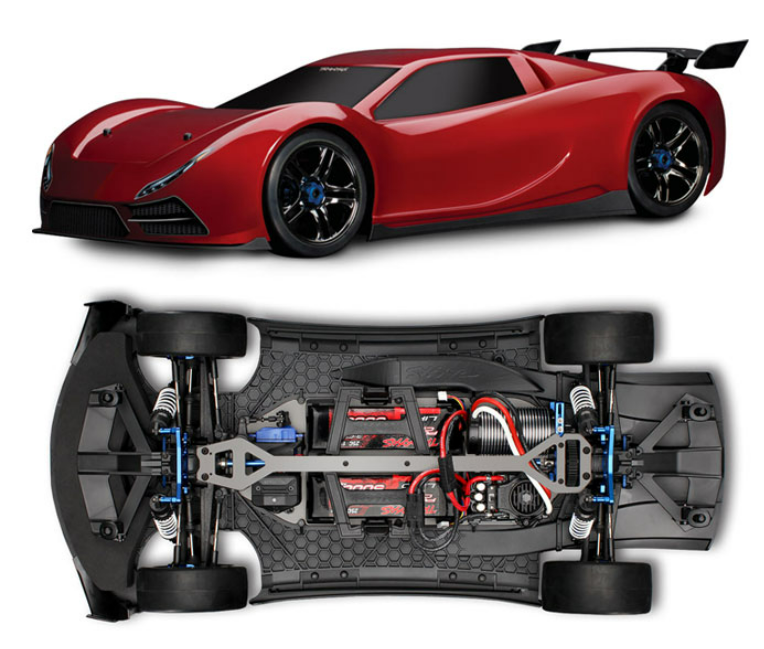
普通のホイールのことを言います。(ラジコンカーに使うやつ)
普通のホイールを使った足回りの種類
1. 独立二輪
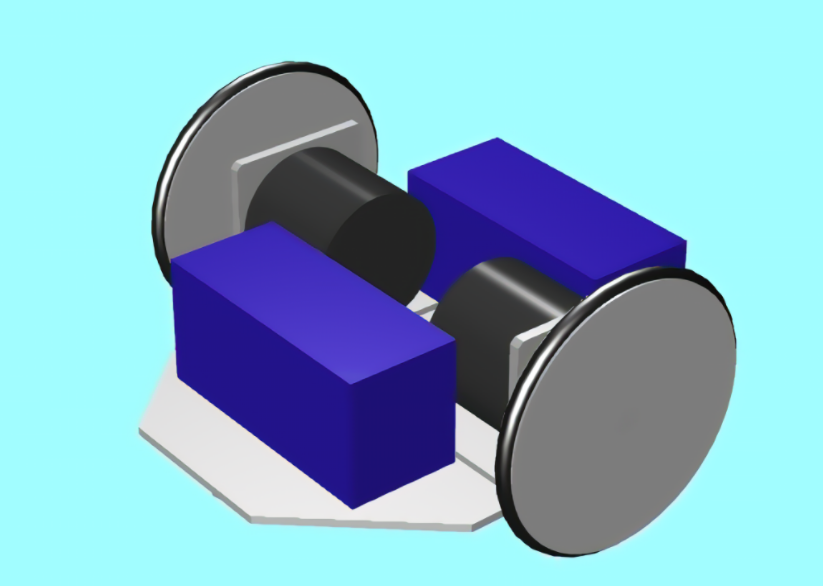
ホイールの数が2個の足回りです。ただ、2個しかホイールがないとバランスを崩してしまうので、足回りの前後にキャスターがついています。
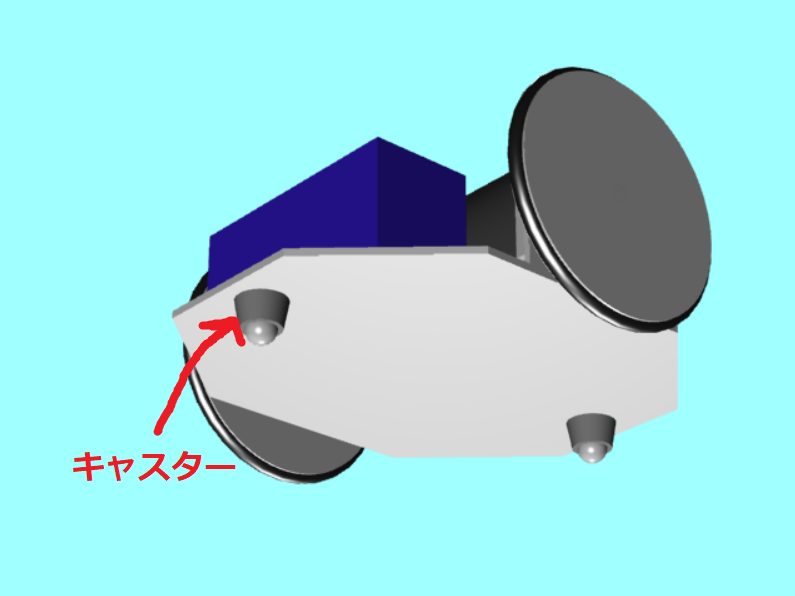
メリット・・・ホイールの数が少ない、滑りにくい、速い デメリット・・・全方向移動するためにはまず旋回しなきゃいけない、トルクが小さい(モーター数が2個なので、重いものを引っ張ったりできるほど力はない)
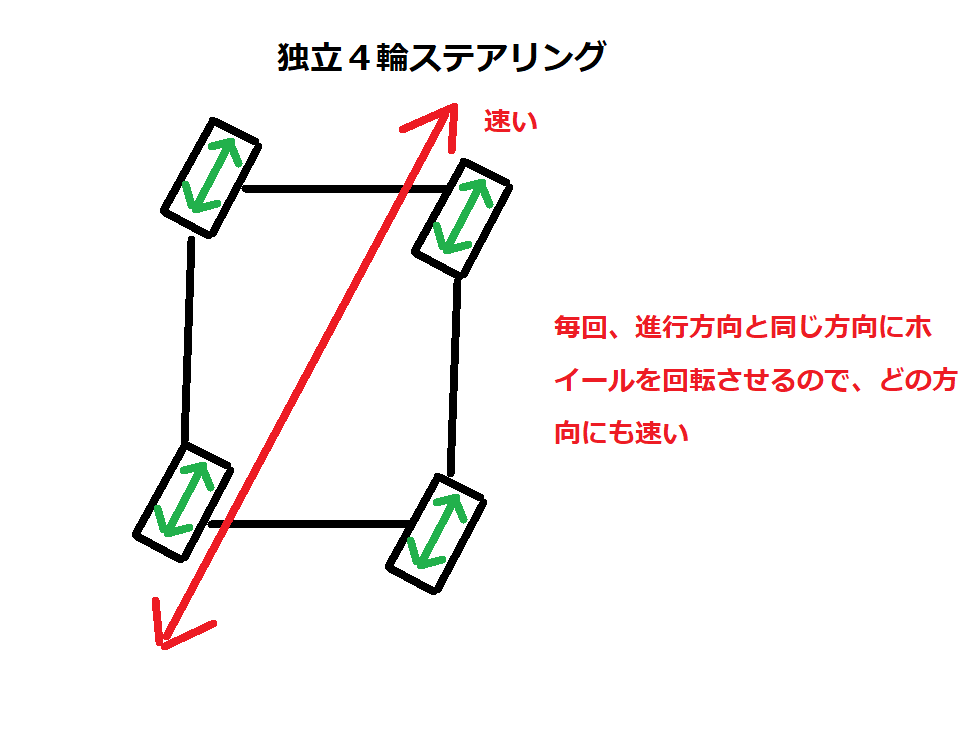
②独立ステアリング
それぞれのホイールにモーターが追加で一個ついており、各々のホイールが独立に方向を変えることができます。
※別に上図のように車輪が4個じゃなきゃダメなわけではないです。
メリット・・・滑りにくい、速い
デメリット・・・設計と加工がめちゃくちゃ大変
③ステアリング
自動車のハンドルを回すと前輪2つ(もしくは後輪2つ)が同時に回転すると思います。ただこれを可能にするのは容易なことではありません。
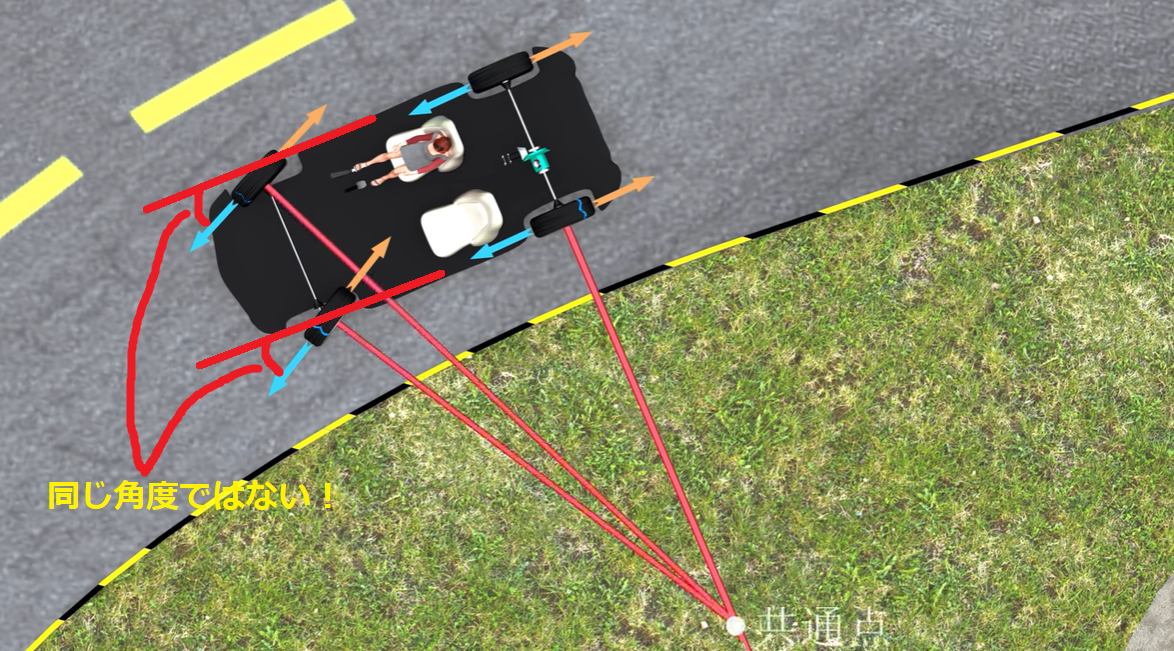
自動車がある基準点を中心に曲がるとき、すべてのホイールからの垂線はその基準点に集まらなくてはならない。 → このとき、駆動輪二つは同じ角度で回転しているわけじゃない。 → これをハンドル一つで可能にしているのがステアリング機構 (ロボコンではあまり使われません)
足回りのスピード
いろいろな足回りを見てきたと思うのですが、どの足回りがどの方向にどれだけ速いのかはまだわからないと思います。そこで足回りの速さを考えるうえで基本的なことを伝えたいと思います。
当たり前かもしれませんが、ホイールというものはその回転方向と同じ方向に進むときに最も速いスピードを出すことができます。
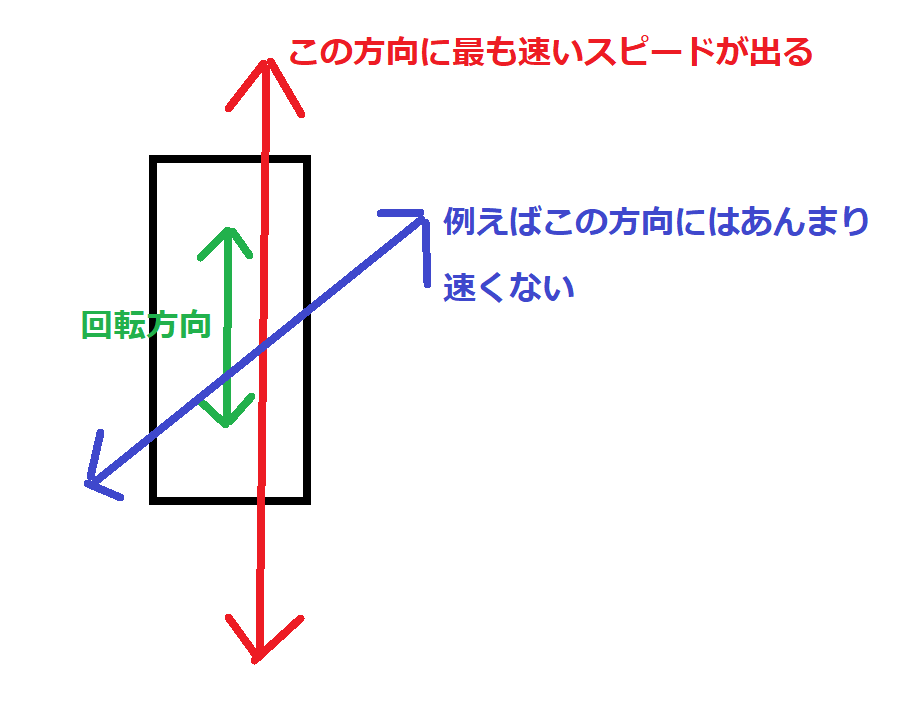
このことをふまえるだけで、どの足回りがどの方向に最も速いのかとかが分かるようになります。いくつかの足回りについて例を挙げてみますので考えてみてください。
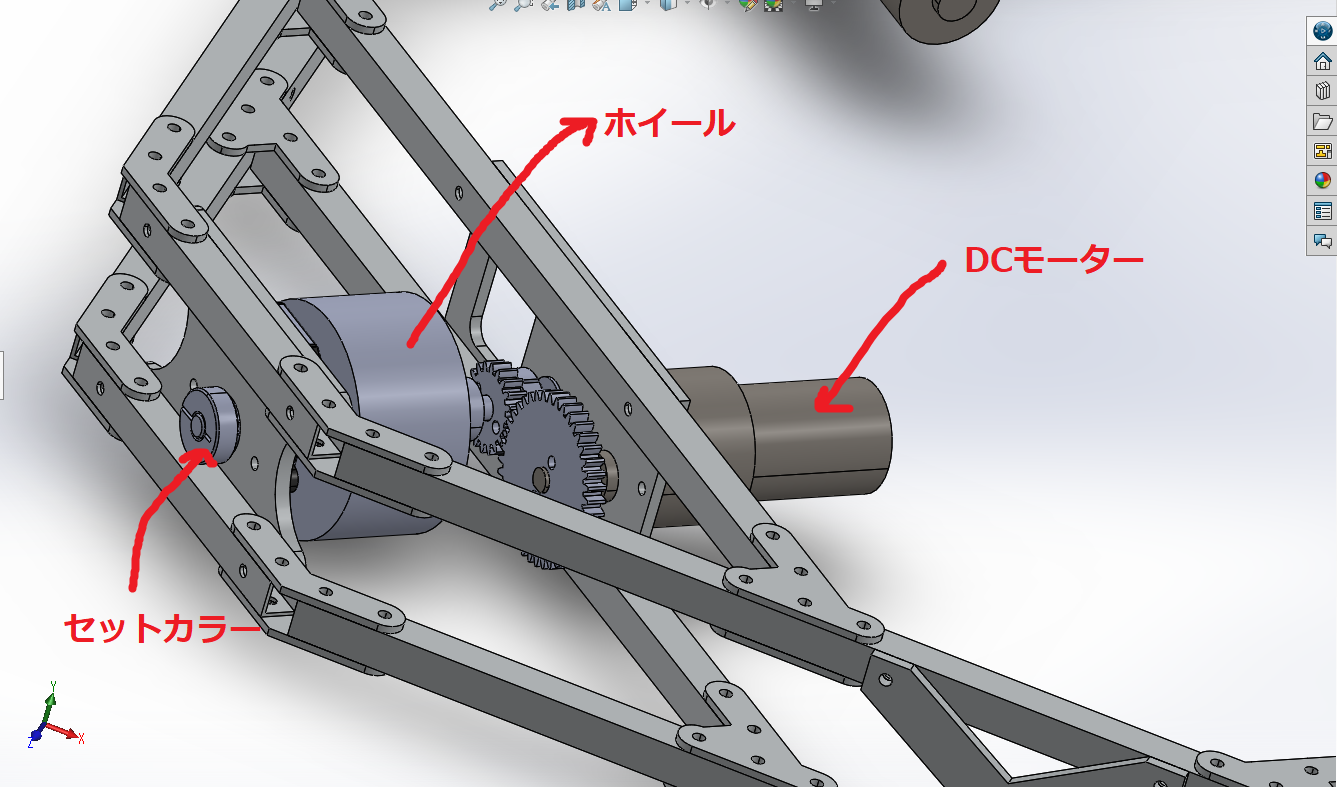
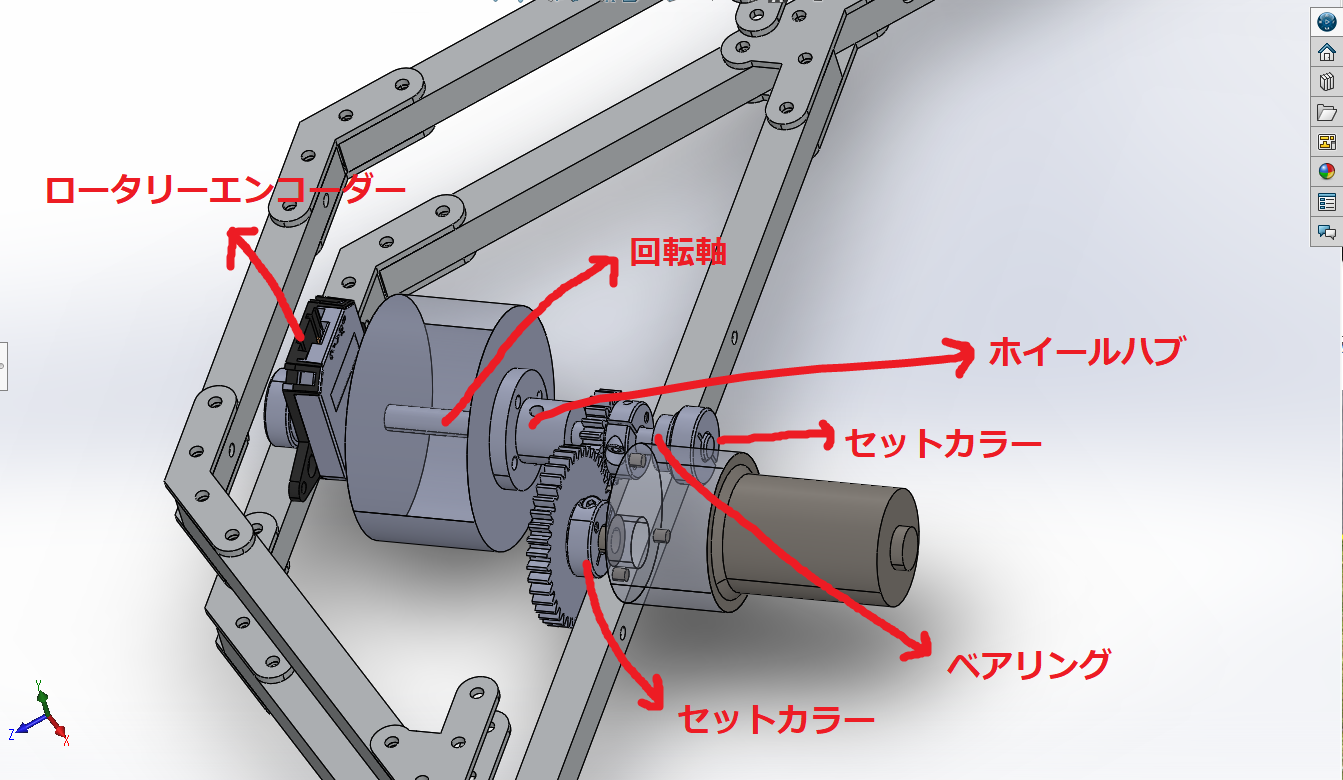
足回りの内部構造
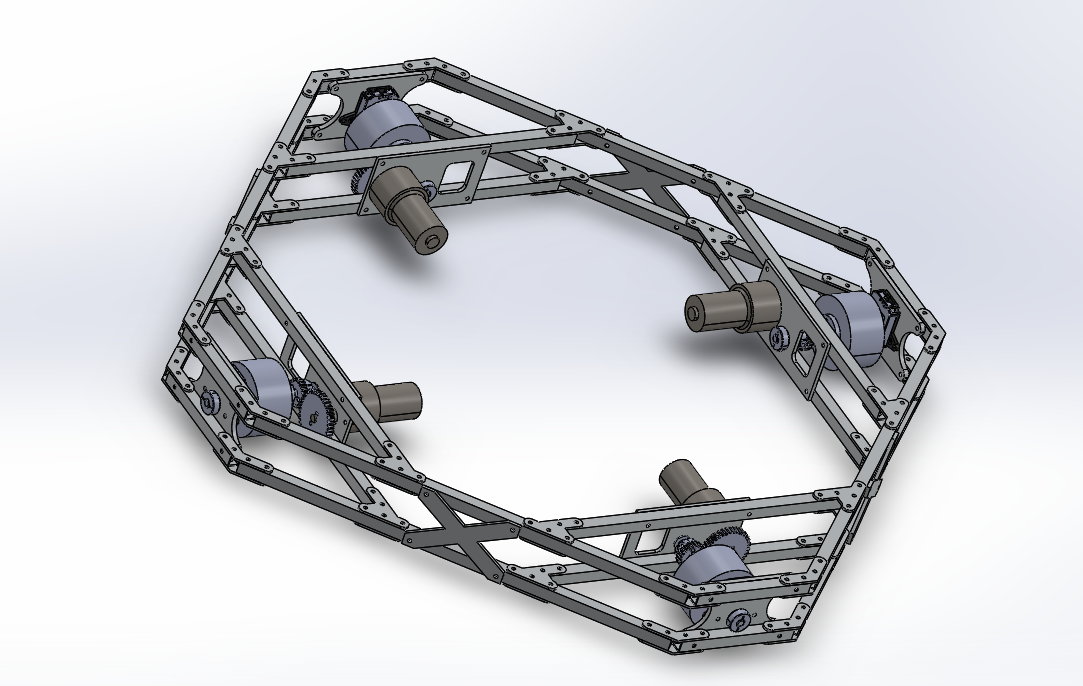
足回りでは以下の部品が使われています。
①ホイール
②DCモーター
③ロータリーエンコーダー
④ベアリング
⑤カップリング(今回の図では使われていませんが、足回りにカップリングが使われることは多々あります。)
⑥回転軸
⑦セットカラー
⑧ホイールハブ
部品説明
②DCモーター
DCモーターという種類のモーターを使います。
③ロータリーエンコーダー
ロータリーエンコーダーとはモーターなどがどれくらい回転したかを測るセンサーです。自動で動くロボットなどの足回りではロータリーエンコーダーは必須です。
⑥回転軸
ホイール、ベアリング、エンコーダー、セットカラーなどはすべて1本の棒にくっついています。その棒です。市販のものを購入することがほとんどらしいです。ちなみにモーターも回転軸と同一直線上に置きたいときは、カップリングを使ってモーターのシャフトと回転軸を締結させます。
⑧ホイールハブ
ホイールと回転軸をくっつける部品です。基本的には、使っているホイール専用の種類のホイールハブが存在します。なんならホイール買ったらホイールハブが付属してくることもあります。
オムニ、メカナムは滑る(その対策)
オムニ、メカナムは滑ります。空回りとかよくおこします。 そのため、
測定輪をつける
加速度センサをつける
というような対策がなされることがあります。